Center of Mass (Rig)
- Home
- Rig
- Rig Structure
- Rig Elements
- Center of Mass (Rig)
The Center of Mass is a unique point that characterizes movement of an object (or a group of objects) as a whole. When a linear force is applied to the center of mass, it causes linear acceleration without angular acceleration.
A Center of Mass is required for Physic Tools to work properly.
More about this here.
Creating Centers of Mass
To create a center of mass:
1. Switch to the Rig mode:
2. Select one or several Rigid Bodies.
3. Go to the Rigging Tools panel.
4. Open the Main actions panel:
5. In the Prototype center of mass section, click Add:
Keep in mind that creating a new Center of Mass causes a couple of issues.
First, Direction Controllers won’t work properly.
This can be fixed by connecting them to the Center of Mass:
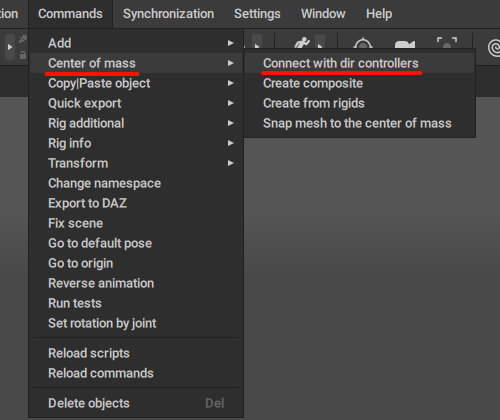
1. Switch to the Rigging Mode.
2. Select Direction Controllers.
3. Select the Center of Mass.
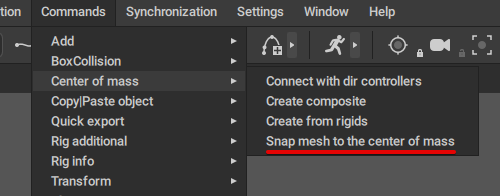
4. Connect them by selecting CenterOfMass → Connect with dir controllers from the Commands menu:
Second, Ballistic Ghosts won’t render with a newly created Center of Mass. To fix this, you’ll need to snap the mesh to it:
1. Switch to the Mesh Mode.
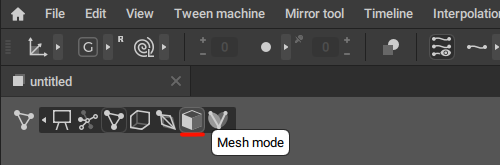
2. Select every mesh that makes up your character.
3. Switch to the Point Controller Mode.
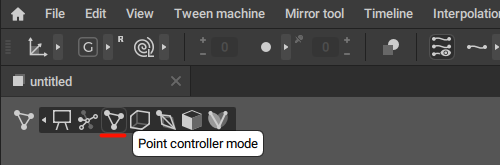
4. Select the Center of Mass.
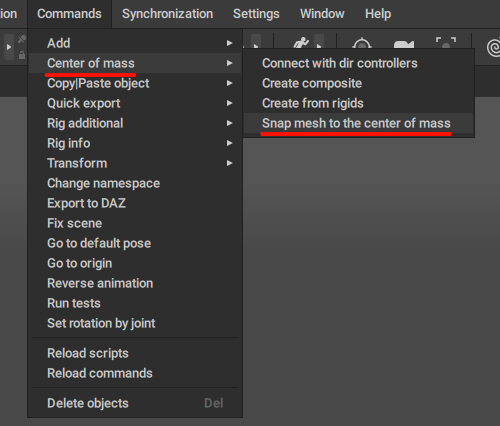
5. Use Commands → CenterOfMass → Snap mesh to the center of mass:
After you take care of these two issues, everything should work as intended.
Attaching Meshes to the Center of Mass
A character needs a Center of Mass for some of the physics-based tools - AutoPhysics, for example - to work properly.
Sometimes, you might end up with a mesh that is not connected to a Center of Mass (if you, for example, import a mesh onto a pre-existing skeleton). In such a case, you'll need to establish the connection manually.
Here's how it can be done:
1. Switch to the Mesh Mode.
2. Select every mesh that makes up your character.
3. Then, switch to the Point Controller mode.
4. Select the Center of Mass.
5. Select Center of Mass → Snap mesh to the center of mass option from the Commands menu:
After this, everything should work fine.
Multiple Centers of Mass
A character might have more than one Center of Mass.
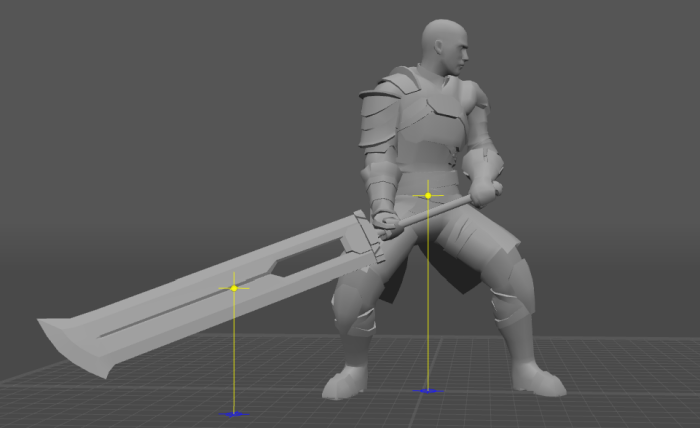
Here, we have a center of mass for the character and another one for the sword the character is holding.
In cases you have two or more CoMs, you might want to add a composite Center of Mass for the entire character.
For example, if you have two characters interacting, a composite center of mass can be used to monitor the characteristics of their interaction.
To create a composite Center of Mass:
1. Switch to the Rigging Mode.
2. Select every Center of Mass.
3. Use Commands → CenterOfMass → Create composite:

The composite Center of Mass, like a regular one, should be connected to the meshes and Direction Controllers, as described above.