Other Behaviors
- Home
- Rig
- Rig Structure
- Behaviors
- Other Behaviors
This page lists Behaviors that don't fit into other categories.
Ballistic tool
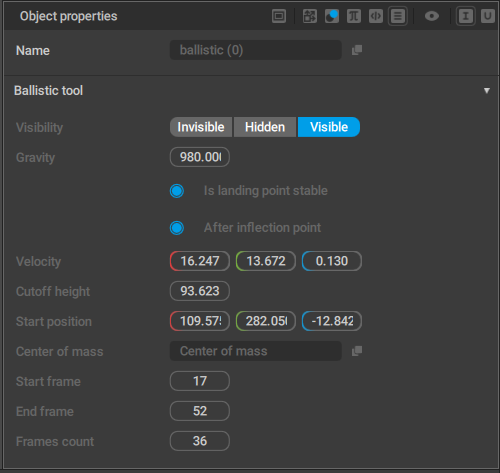
This behavior sets various parameters for Ballistic Trajectpries. It is specific only for said trajectories.
Detailed description of these parameters can be found on the Ballistic Trajectory page, under the Ballistic Settings section.
Enforce Save Data
If this behavior is applied to an object, the data for it is saved in every frame, regardless of whether the frame is a keyframe or a regular one.
Manipulator Locker
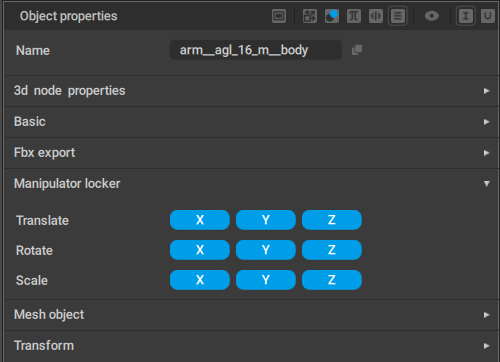
This behavior defines if a corresponding Mesh object can be translated, rotated or scaled across different coordinate axes.
Applied exclusively to Meshes.
Translate
Sets axes (X, Y and Z) along which the Mesh can be translated.
Rotate
Sets axes across which the Mesh can be rotated.
Scale
Sets axes along which the Mesh can be scaled.
By default every axis is disabled; the mesh can only move along with corresponding Joints.
Fulcrum Point
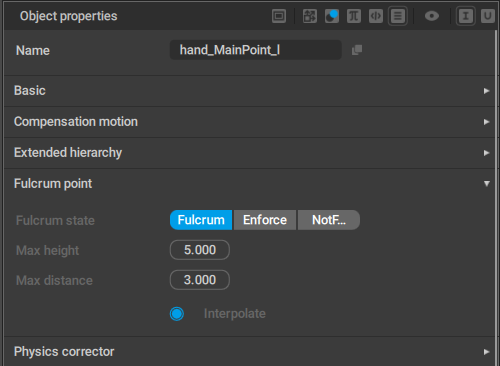
This behavior is applied to Point Controllers when they are used as fulcrum points in AutoPhysics simulations.
Fulcrum state
Sets the conditions for when the controller should be considered a fulcrum point:
Fulcrum means the controller is considered a fulcrum point when the conditions are met.
This is the default value.
Enforce means the controller is always considered a fulcrum point, even when the conditions are not met.
Finally, if NotFulcrum is enabled, the controller is never considered a fulcrum point
Disabled by default.
Max height
Sets the maximum vertical distance the Point Controller can be shifted without losing its properties as a fulcrum point.
Increasing this value can be necessary for fixing some errors in AutoPhysics simulations.
Set to 10 by default.
Max distance
Same as above, but defines the maximum horizontal shift.
Also set to 10 by default.
Interpolate
If this setting is enabled, the Point Controller is interpolated after it loses its position as a fulcrum point. Interpolation is performed across several frames (defined by the N interpolation frames parameter on the AutoPhysics (Advanced) tab) to move the point closer to the animation trajectory.
Enabled by default.
Fulcrum group
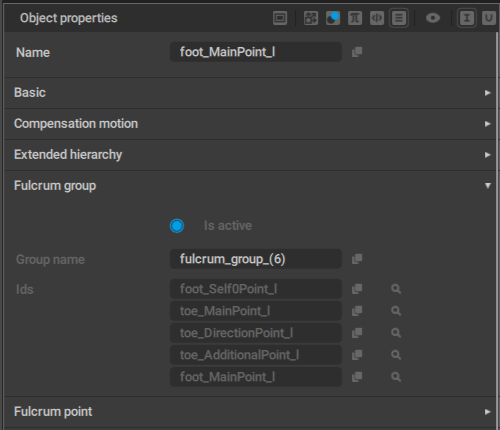
This behavior defines the group of fulcrum points.
If one of the points in the group is considered a fulcrum point, every point in the group is fixed.
This behavior is mostly used for the situations when character legs get distorted.
Is active
Defines if the group is active or not.
When this option is enabled, the fulcrum group behavior (described above) is in effect. Otherwise, it is not.
Enabled by default.
Group name
The name of the fulcrum group.
Ids
Links to the controllers included in the fulcrum group.
Limb Direction and Limb Direction Data
These are two behaviors associated with Direction Controlers.
See that page and specifically the Direction Controller Settings part for detailed descriptions of the parameters they include.