Rotation Trajectories
- Home
- Tools
- Animation Tools
- Rotation Trajectories
While regular Trajectories are useful for understanding and altering characteristics of the motion, they do not tell you anything about object rotation.
This might be an issue in some cases. Specifically for these cases, Rotation Trajectories are implemented.
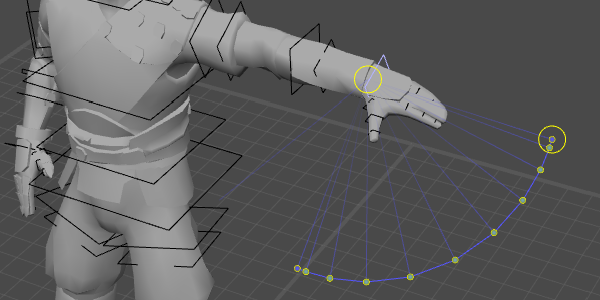
A rotation trajectory renders object rotation for every selected frame and allows you to make adjustments to these rotations.
Enabling Rotation Trajectories
Rotation Trajectories can be rendered for all objects that store Rotation data: Box Controllers, Joints, Meshes, Locators etc.
If you want to observe and edit the rotation trajectory of a character’s body part, it’s recommended that you interact with the Box Controllers. They store rotation data and have a dedicated setting - Rotate hierarchy - that helps with adjusting the rotation.
However, you can still observe the rotation trajectories of any other objects that store rotation data, such as Joints, Meshes, Locators, and others.
To enable rotation trajectories:
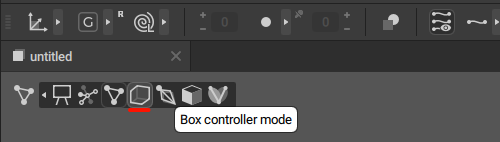
1. Switch to the Box Controller Mode:
2. Select a Box Controller
3. Select an interval on the Timeline.
4. Enable Rotation trajectories on the Toolbar:

Disabling Rotation Trajectories
To disable Rotation Trajectories:
1. Click the Rotation trajectories button one more time.
Doing so will switch it back to the regular Translation trajectories.
Settings

Rotation Trajectories can operate in several modes:
Global with translation
In this mode, rotation vectors follow the general trajectory of the selected object (like the Rotation manipulator arrow would have on the corresponding frames).
Global
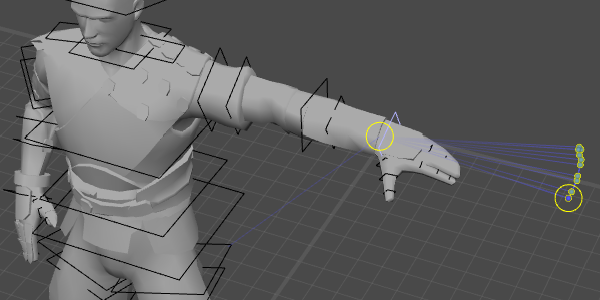
Shows rotations in relation to the current frame.
Local
Shows object rotations in relation to its parent. If the selected object has no parent, its Local rotation is equal to Global.
Rotated axis
These buttons are used for choosing the coordinate axis (X, Y or Z) on which rotation vectors should lie.
Rotation plane
Sets the coordinate axis (X, Y or Z) on which trajectory points can be moved.
The Free setting means that points can be move along all three axes.
Rotate hierarchy
If this is enabled, Box Controllers will rotate when you rotate their parents.
Rotator scale
Sets the scale for the Rotation Trajectory.
Tangents (edit mode only)
If this is enabled, Trajectory Tangents are shown on the visible trajectory, whent the Trajectory Edit mode is turned on.
Enabled by default.
Link Tangents
If this option is enabled, tangent handles are linked i.e. adjusting one of them does affect the other’s angle. If it is disabled, tangents can be edited independently from one another.
Also enabled by default.
Relative to Pivot
If this is enabled, the trajectory is rendered in relation to the pivot point:
Disabled by default.
A pivot point can be set by right-clicking a Point Controller.
By default, the selected Point Controller is set as a pivot. In this case, trajectory in relation to pivot has zero length.

The same trajectory in relation to different pivot points.
Fix Pivot
If this option is enabled, pivot point cannot be set manually:

An example of using this option. When Fix Pivot is enabled, setting different pivots doesn’t affect the trajectory.
This option is also disabled by default.
Using Rotation Trajectories
This feature is useful when you want to visualize and remove unnecessary rotations, during mocap cleaning for example.
To edit particular points of the Rotation Trajectory:
1. Enable Trajectory Edit Mode:

2. Select points on the trajectory.
3. Apply Manipulators to them:
As usual, changing rotation on a keyframe would affect every frame on the neighbouring intervals (as shown above). Changing rotation on a regular frame would only affect that frame (interpolation on the corresponding interval would change to the Fixed type).
Rotation trajectories are intended only for adjusting object rotations. To deal with positions, use regular Trajectories.